Method
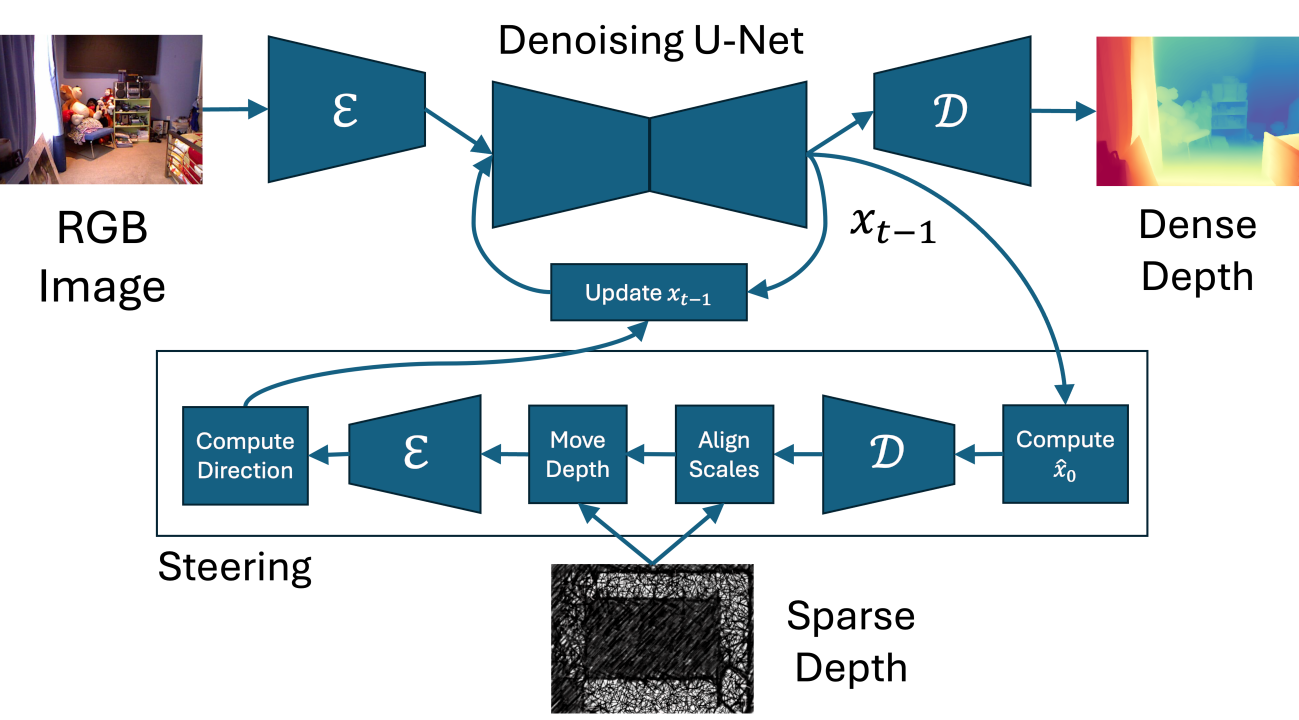
The method runs Marigold, the diffusion-based monocular depth estimator, in 50 DDPM iterations. The noisy sample is updated between the iterations moving the final prediction close to the provided sparse depth condition. After each time step $t$, we estimate a clean data sample $\tilde{x}_0$ and, together with the condition, we use it to compute the direction in which we update the noisy sample $x_{t-1}$. It is not possible to interpret $\tilde{x}_0$ in the latent space, thus it must be decoded by the decoder $\mathcal{D}$. Consequently, we align scales of the depth condition and decoded $\tilde{x}_0$ and move the depth estimate closer to the provided condition. Moving the depth utilizes linear interpolation of points sampled from the depth estimate as well as the condition. The moved depth estimate is then encoded by $\mathcal{E}$ back to the latent space. We determine the update direction of $x_{t-1}$ as a difference between the moved depth estimate and $x_{t-1}$ scaled by a time $t$ dependent factor. Lastly, to retrieve the metric depth, we rescale and shift the final depth prediction by minimizing the square error with respect to the sparse depth condition. Note, that the image below depicts $\mathcal{E}$, $\mathcal{D}$ twice but one instance of each is run in reality.